|
Taekbeom Lee I'm Ph.D. student at Seoul National University, Department of Aerospace Engineering, advised by Prof. H. Jin Kim. Before that, I received Bachelor's degrees in Mechanical and Aerospace Engineering at SNU. I've worked on embodied exploration and reasoning, active mapping system, 3d reconstruction based on neural implicit representation, and object SLAM. |

|
ResearchI'm interested in embodied AI (embodied question answering, multi-modal navigation, task planning, etc.), 3d computer vision (3d reconstruction, 3d generative models, etc.), SLAM (object SLAM, radiance field based, etc.), world models, 3d vision foundation models, etc. |
|
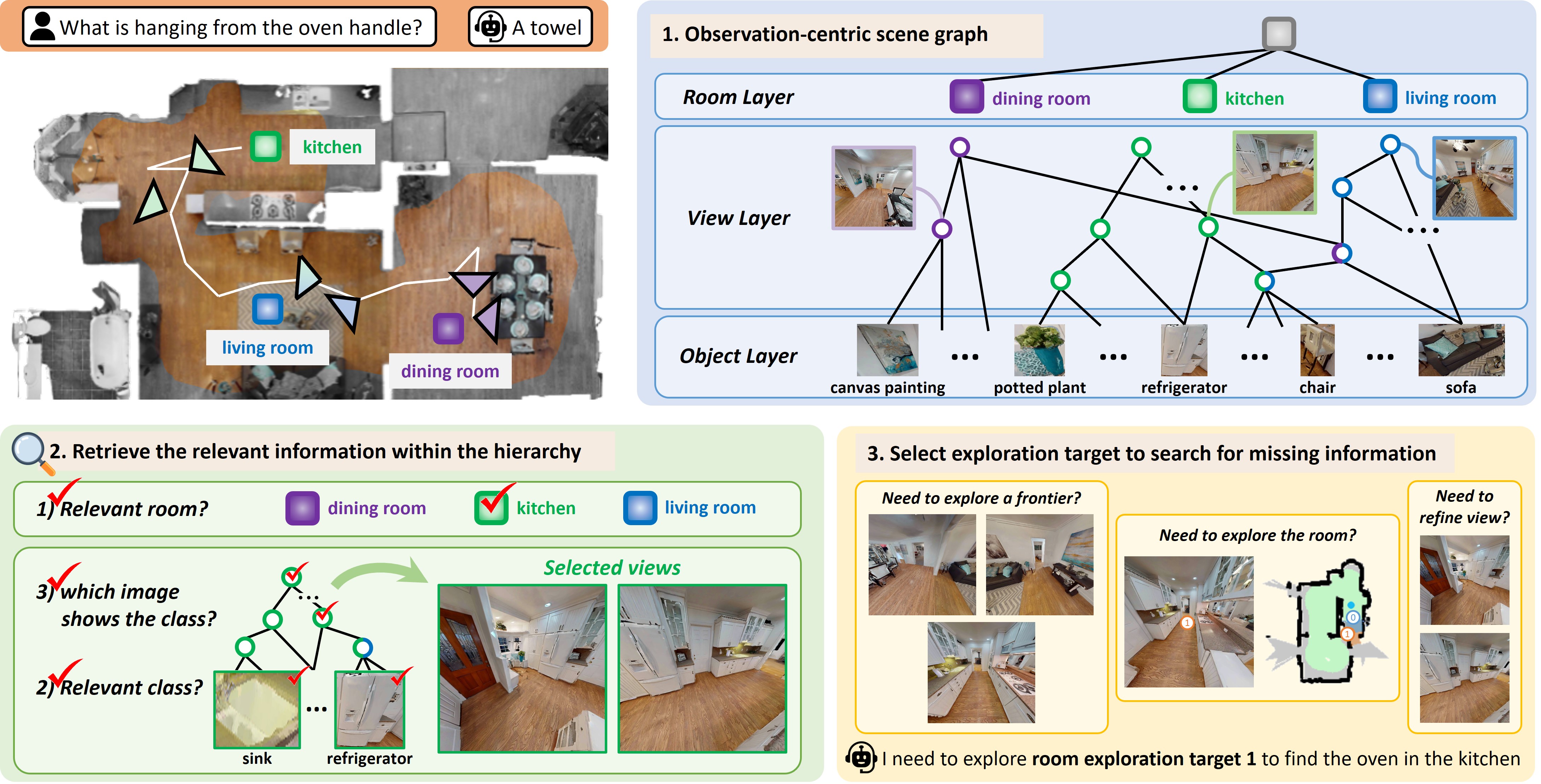
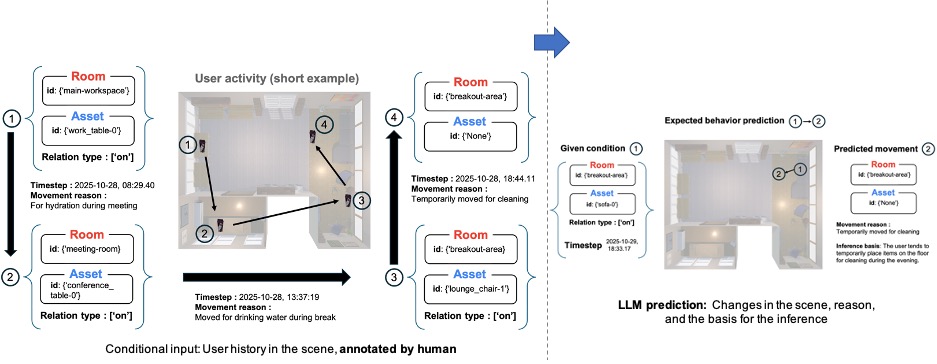
ObsGraph: Hierarchical Observation Representation for Embodied Reasoning and Exploration
Taekbeom Lee, Youngseok Jang, Jeonghwa Heo, Jeongjun Choi, H. Jin Kim Under review We propose ObsGraph, an observation-centric hierarchical scene graph that unifies scene representation, retrieval, and exploration, organizing visual evidence into room–view–object layers to enable coarse-to-fine hierarchical retrieval and targeted multi-scale exploration. |
|
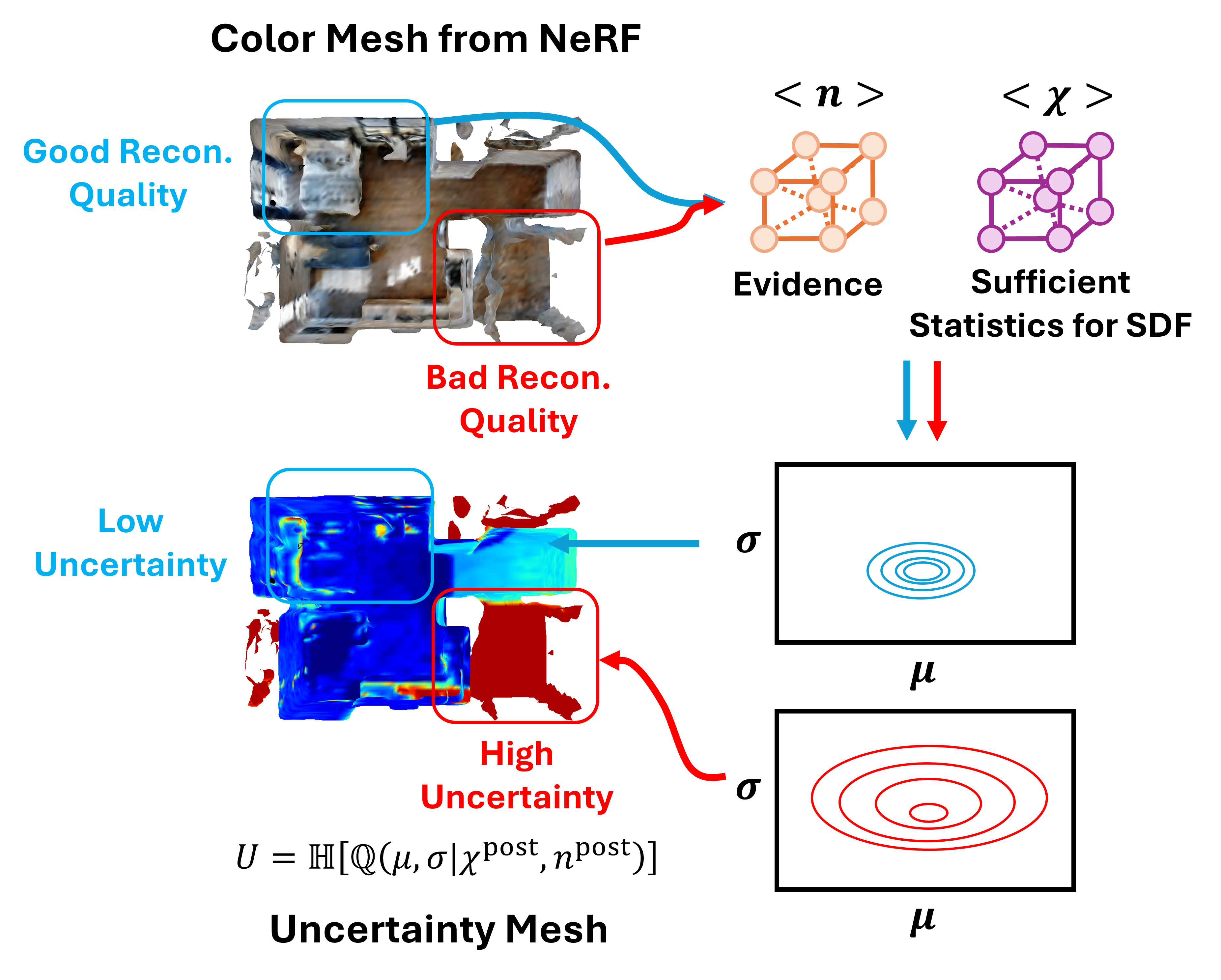
HERE: Hierarchical Active Exploration of Radiance Field with Epistemic Uncertainty Minimization
Taekbeom Lee*, Dabin Kim*, Youngseok Jang, H. Jin Kim (*equal contribution) Robotics and Automation Letters (RA-L), 2026 project page / arXiv / github / video We present HERE, an active 3D scene reconstruction framework based on neural radiance fields, enabling high-fidelity implicit mapping via camera trajectory generation driven by epistemic uncertainty estimated through evidential deep learning, for efficient data acquisition and precise scene reconstruction. |
|
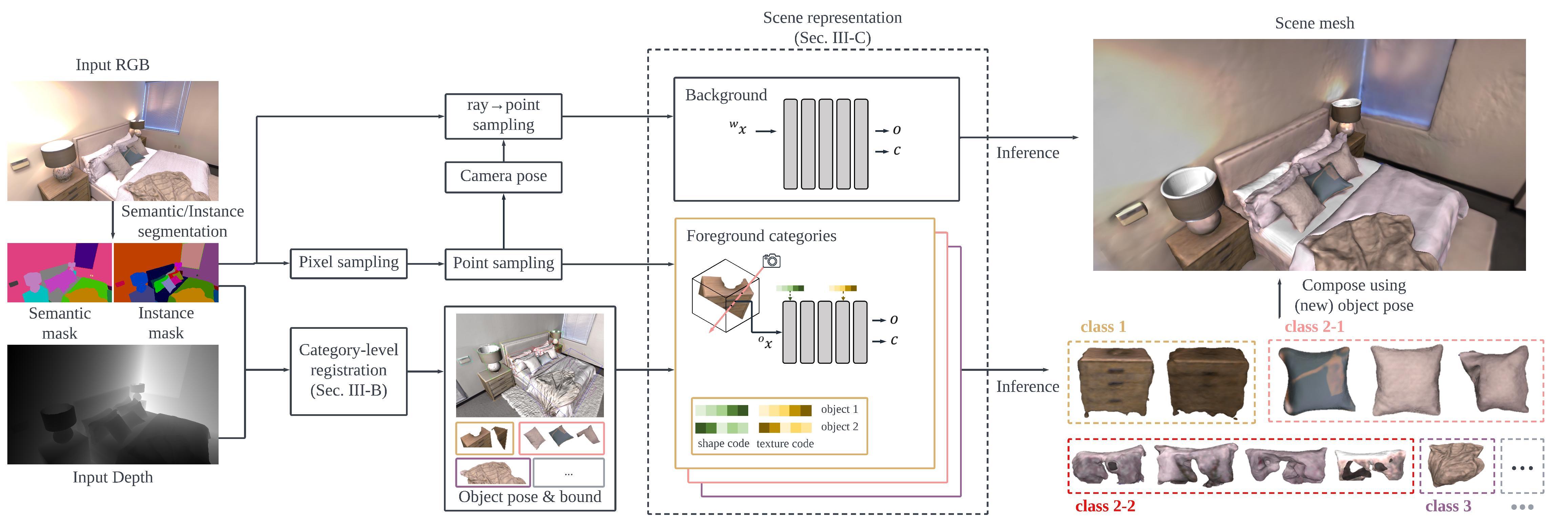
Category-level Neural Field for Reconstruction of Partially Observed Objects in Indoor Environment
Taekbeom Lee, Youngseok Jang, H. Jin Kim Robotics and Automation Letters (RA-L), 2024 arXiv / github / video We introduce category-level neural fields that learn meaningful common 3D information among objects belonging to the same category present in the scene. |
 |
Object Remover Performance Evaluation Methods Using Classwise Object Removal Images
Changsuk Oh, Dongseok Shim, Taekbeom Lee, H. Jin Kim Sensors, 2024 arXiv We propose new evaluation methods tailored to gauge the performance of an object remover. We confirm that the proposed methods can make judgments consistent with human evaluators in the COCO dataset, and that they can produce measurements aligning with those using object removal ground truth in the self-acquired dataset. |
|
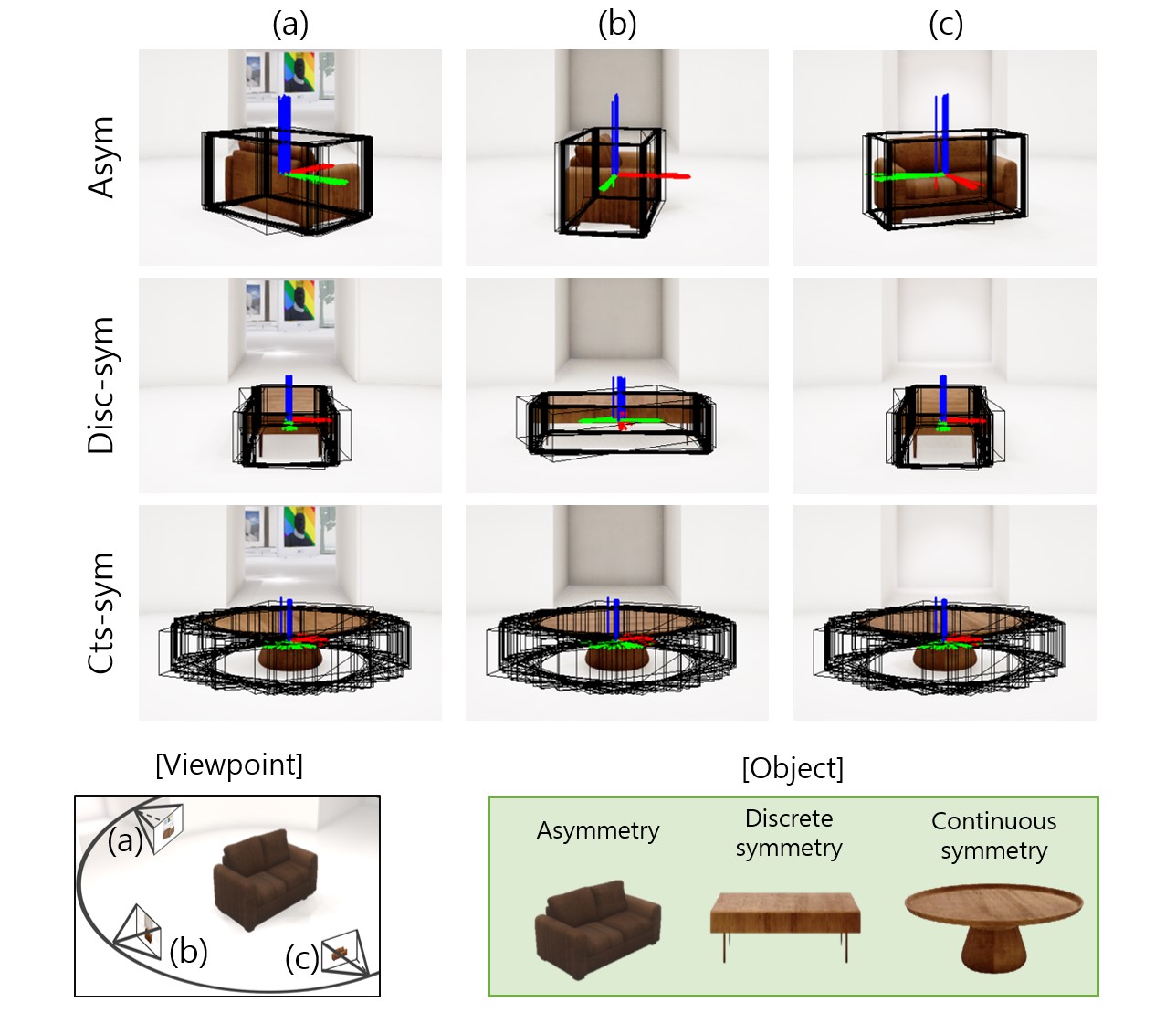
Object-based SLAM utilizing unambiguous pose parameters considering general symmetry types
Taekbeom Lee*, Youngseok Jang*, H. Jin Kim (*equal contribution) ICRA, 2023 arXiv / video This work proposes a system for robustly optimizing the pose of cameras and objects even in the presence of symmetric objects. |
Projects |
|
|
L3IN: Intelligent Robot Navigation with Efficient LLM Interaction, Long-Term Consistency, and Location-Specific Expertise
Supported by Samsung Research Funding & Incubation Center for Future Technology of Samsung Electronics
|

|
Uncertainty quantification and OOD detection in road condition estimator
Co-work with Hyundai Motor Company
|
Awards and Achievements |
- [Scholarship] Brain Korea 21 (BK21) Fellowship for Excellent Graduate Students (Mar. 2023 - Jun. 2023)
- [Scholarship] National Science & Technology Scholarship (Mar. 2017 - Dec. 2020)
Academic Service |
- Conference reviewer for ICRA'25
- Conference reviewer for ICCV'25
Teaching |
- [Research Assistant] Undergraduate Research Opportunity Program (Advisor: Pf. H. Jin Kim), Seoul National University (2024 Fall)
- [Teaching Assistant] Integrated Aerospace Systems Design and Manufacturing 1 & 2, Seoul National University (2024 Spring)
|
The template for this website is borrowed from Dr. Jon Barron. Thanks! |